kopia lustrzana https://github.com/threeme3/usdx
Added (marked) schematic and layout.
Remove unused and experimental code. Relaxed LCD smeter refresh rate (in order to reduce interference on RX). Allow ADC/RX-TX setup times (wait long enough before enabling TX, and disable TX well before stopping ADC). Added CPU benchmark for ISR processing during TX. Added operational instructions. Added performance measurements. Cosmetic and usability changes.pull/8/head
rodzic
aaa0df404e
commit
a7eb5ecc7c
562
QCX-SSB.ino
562
QCX-SSB.ino
|
|
@ -31,7 +31,7 @@ LiquidCrystal lcd(LCD_RS, LCD_EN, LCD_D4, LCD_D5, LCD_D6, LCD_D7);
|
|||
#include <inttypes.h>
|
||||
#include <avr/sleep.h>
|
||||
#include <avr/wdt.h>
|
||||
#define F_CPU 20000000 // Crystal frequency of XTAL1
|
||||
#define F_CPU 20000000UL // Crystal frequency of XTAL1
|
||||
|
||||
#define I2C_DDR DDRC // Pins for the I2C bit banging
|
||||
#define I2C_PIN PINC
|
||||
|
|
@ -165,83 +165,6 @@ inline void si5351_SendPLLBRegisterBulk() // fast freq change of PLLB, takes ab
|
|||
i2c_stop();
|
||||
}
|
||||
|
||||
/*
|
||||
// Set up specified PLL with mult, num and denom
|
||||
// si5351_mult is 15..90
|
||||
// num is 0..1,048,575 (0xFFFFF)
|
||||
// denom is 0..1,048,575 (0xFFFFF)
|
||||
void si5351_SetupPLL(uint8_t pll, uint8_t mult, uint32_t num, uint32_t denom)
|
||||
{
|
||||
uint32_t P1; // PLL config register P1
|
||||
uint32_t P2; // PLL config register P2
|
||||
uint32_t P3; // PLL config register P3
|
||||
|
||||
P1 = (uint32_t)(128 * ((float)num / (float)denom));
|
||||
P1 = (uint32_t)(128 * (uint32_t)(mult) + P1 - 512);
|
||||
P2 = (uint32_t)(128 * ((float)num / (float)denom));
|
||||
P2 = (uint32_t)(128 * num - denom * P2);
|
||||
P3 = denom;
|
||||
|
||||
si5351_SendRegister(pll + 0, (P3 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(pll + 1, (P3 & 0x000000FF));
|
||||
si5351_SendRegister(pll + 2, (P1 & 0x00030000) >> 16);
|
||||
si5351_SendRegister(pll + 3, (P1 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(pll + 4, (P1 & 0x000000FF));
|
||||
si5351_SendRegister(pll + 5, ((P3 & 0x000F0000) >> 12) | ((P2 & 0x000F0000) >> 16));
|
||||
si5351_SendRegister(pll + 6, (P2 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(pll + 7, (P2 & 0x000000FF));
|
||||
}
|
||||
|
||||
// Set up MultiSynth with integer divider and R divider
|
||||
// R divider is the bit value which is OR'ed onto the appropriate register
|
||||
void si5351_SetupMultisynthInt(uint8_t synth, uint32_t divider, uint8_t rDiv)
|
||||
{
|
||||
uint32_t P1; // Synth config register P1
|
||||
uint32_t P2; // Synth config register P2
|
||||
uint32_t P3; // Synth config register P3
|
||||
|
||||
P1 = 128 * divider - 512;
|
||||
P2 = 0; // P2 = 0, P3 = 1 forces an integer value for the divider
|
||||
P3 = 1;
|
||||
|
||||
si5351_SendRegister(synth + 0, (P3 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 1, (P3 & 0x000000FF));
|
||||
si5351_SendRegister(synth + 2, ((P1 & 0x00030000) >> 16) | rDiv);
|
||||
si5351_SendRegister(synth + 3, (P1 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 4, (P1 & 0x000000FF));
|
||||
si5351_SendRegister(synth + 5, ((P3 & 0x000F0000) >> 12) | ((P2 & 0x000F0000) >> 16));
|
||||
si5351_SendRegister(synth + 6, (P2 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 7, (P2 & 0x000000FF));
|
||||
}
|
||||
|
||||
// Set up MultiSynth with fractional divider, num and denom and R divider
|
||||
// divider is 8..900 (and in addition 4,6 for integer mode)
|
||||
// num is 0..1,048,575 (0xFFFFF)
|
||||
// denom is 0..1,048,575 (0xFFFFF)
|
||||
// for integer mode set: num = 0, denom = 1
|
||||
void si5351_SetupMultisynthFrac(uint8_t synth, uint8_t divider, uint32_t num, uint32_t denom, uint8_t rDiv)
|
||||
{
|
||||
uint32_t P1; // Synth config register P1
|
||||
uint32_t P2; // Synth config register P2
|
||||
uint32_t P3; // Synth config register P3
|
||||
|
||||
P1 = (uint32_t)(128 * ((float)num / (float)denom));
|
||||
P1 = (uint32_t)(128 * (uint32_t)(divider) + P1 - 512);
|
||||
P2 = (uint32_t)(128 * ((float)num / (float)denom)); // P2 = 0, P3 = 1 forces an integer value for the divider
|
||||
P2 = (uint32_t)(128 * num - denom * P2);
|
||||
P3 = denom;
|
||||
|
||||
si5351_SendRegister(synth + 0, (P3 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 1, (P3 & 0x000000FF));
|
||||
si5351_SendRegister(synth + 2, (P1 & 0x00030000) >> 16 | rDiv);
|
||||
si5351_SendRegister(synth + 3, (P1 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 4, (P1 & 0x000000FF));
|
||||
si5351_SendRegister(synth + 5, ((P3 & 0x000F0000) >> 12) | ((P2 & 0x000F0000) >> 16));
|
||||
si5351_SendRegister(synth + 6, (P2 & 0x0000FF00) >> 8);
|
||||
si5351_SendRegister(synth + 7, (P2 & 0x000000FF));
|
||||
}
|
||||
*/
|
||||
|
||||
// Set up MultiSynth for register reg=MSNA, MNSB, MS0-5 with fractional divider, num and denom and R divider (for MSn, not for MSNA, MSNB)
|
||||
// divider is 15..90 for MSNA, MSNB, divider is 8..900 (and in addition 4,6 for integer mode) for MS[0-5]
|
||||
// num is 0..1,048,575 (0xFFFFF)
|
||||
|
|
@ -369,76 +292,6 @@ void si5351_alt_clk2(uint32_t freq)
|
|||
si5351_SendRegister(SI_PLL_RESET, 0xA0);
|
||||
}
|
||||
|
||||
void si5351_freq_clk2(uint32_t freq)
|
||||
{
|
||||
uint8_t r_div = (freq > 4000000) ? 1 : (freq > 400000) ? 32 : 128; // helps si5351_divider to be in range
|
||||
freq *= r_div; // Calculate frequency before r_div
|
||||
|
||||
// freq is in the range 1MHz to 150MHz
|
||||
si5351_divider = 900000000 / freq; // Calculate the division ratio. 900,000,000 is the maximum internal PLL freq (official range 600..900MHz but can be pushed to 300MHz..>900Mhz)
|
||||
if(si5351_divider % 2) si5351_divider--; // si5351_divider in range 4,6.. 254 (could be 900 for uint16 datatype), even numbers preferred
|
||||
if( (si5351_divider * (freq-5000) / SI_XTAL_FREQ) != (si5351_divider * (freq+5000) / SI_XTAL_FREQ) ) si5351_divider-=2; // Test if si5351_multiplier remains same for freq deviation +/- 5kHz, if not use different si5351_divider to make same
|
||||
uint32_t pll_freq = si5351_divider * freq; // Calculate the pll_freq: the si5351_divider * desired output freq
|
||||
|
||||
si5351_mult = pll_freq / SI_XTAL_FREQ; // Determine the si5351_multiplier to get to the required pll_freq (in the range 15..90)
|
||||
uint64_t l = pll_freq % SI_XTAL_FREQ; // // distance of pll_freq with si5351_multiple of xtal frequency. It has three parts:
|
||||
l <<= 20; l--; // l *= 1048575;
|
||||
l /= SI_XTAL_FREQ; // normalize
|
||||
uint32_t num = l; // the actual si5351_multiplier is si5351_mult + num / denom
|
||||
//num and denom are the fractional parts, the numerator and denominator each is 20 bits (range 0..1048575)
|
||||
const uint32_t denom = 0xFFFFF; // For simplicity we set the denominator to the maximum 1048575
|
||||
// Set up specified PLL with si5351_mult, num and denom: si5351_mult is 15..90, num is 0..1,048,575 (0xFFFFF), denom is 0..1,048,575 (0xFFFFF)
|
||||
uint32_t term = num * 128 / denom; // 128.0 * (num / denom)
|
||||
uint32_t P1 = 128 * si5351_mult + term - 512;
|
||||
uint32_t P2 = 128 * num - denom * term;
|
||||
uint32_t P3 = denom;
|
||||
si5351_pll_data[0] = 0xFF;
|
||||
si5351_pll_data[1] = 0xFF;
|
||||
si5351_pll_data[2] = (P1 >> 14) & 0x0C;
|
||||
si5351_pll_data[3] = P1 >> 8;
|
||||
si5351_pll_data[4] = P1;
|
||||
si5351_pll_data[5] = 0xF0 | ((P2 & 0x000F0000) >> 16);
|
||||
si5351_pll_data[6] = P2 >> 8;
|
||||
si5351_pll_data[7] = P2;
|
||||
si5351_SendPLLBRegisterBulk();
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111000); //CLK2_EN=en, CLK1_EN, CLK0_EN
|
||||
}
|
||||
|
||||
void si5351_freq_clk2_10millihz(uint32_t freq)
|
||||
{
|
||||
uint8_t r_div = ((freq/100UL) > 4000000) ? 1 : ((freq/100UL) > 400000) ? 32 : 128; // helps si5351_divider to be in range
|
||||
freq *= r_div; // Calculate frequency before r_div
|
||||
|
||||
// freq is in the range 1MHz to 150MHz
|
||||
si5351_divider = 900000000 / (freq/100UL); // Calculate the division ratio. 900,000,000 is the maximum internal PLL freq (official range 600..900MHz but can be pushed to 300MHz..>900Mhz)
|
||||
if(si5351_divider % 2) si5351_divider--; // si5351_divider in range 4,6.. 254 (could be 900 for uint16 datatype), even numbers preferred
|
||||
if( (si5351_divider * ((freq/100UL)-5000) / SI_XTAL_FREQ) != (si5351_divider * ((freq/100UL)+5000) / SI_XTAL_FREQ) ) si5351_divider-=2; // Test if si5351_multiplier remains same for freq deviation +/- 5kHz, if not use different si5351_divider to make same
|
||||
uint64_t pll_freq = (uint64_t)si5351_divider * (uint64_t)freq; // Calculate the pll_freq: the si5351_divider * desired output freq
|
||||
|
||||
si5351_mult = pll_freq / (SI_XTAL_FREQ*100ULL); // Determine the si5351_multiplier to get to the required pll_freq (in the range 15..90)
|
||||
uint64_t l = pll_freq % (SI_XTAL_FREQ*100ULL); // distance of pll_freq with si5351_multiple of xtal frequency. It has three parts:
|
||||
l <<= 20; l--; // l *= 1048575;
|
||||
l /= (SI_XTAL_FREQ*100ULL); // normalize
|
||||
uint32_t num = l; // the actual si5351_multiplier is si5351_mult + num / denom
|
||||
//num and denom are the fractional parts, the numerator and denominator each is 20 bits (range 0..1048575)
|
||||
const uint32_t denom = 0xFFFFF; // For simplicity we set the denominator to the maximum 1048575
|
||||
// Set up specified PLL with si5351_mult, num and denom: si5351_mult is 15..90, num is 0..1,048,575 (0xFFFFF), denom is 0..1,048,575 (0xFFFFF)
|
||||
uint32_t term = num * 128 / denom; // 128.0 * (num / denom)
|
||||
uint32_t P1 = 128 * si5351_mult + term - 512;
|
||||
uint32_t P2 = 128 * num - denom * term;
|
||||
uint32_t P3 = denom;
|
||||
si5351_pll_data[0] = 0xFF;
|
||||
si5351_pll_data[1] = 0xFF;
|
||||
si5351_pll_data[2] = (P1 >> 14) & 0x0C;
|
||||
si5351_pll_data[3] = P1 >> 8;
|
||||
si5351_pll_data[4] = P1;
|
||||
si5351_pll_data[5] = 0xF0 | ((P2 & 0x000F0000) >> 16);
|
||||
si5351_pll_data[6] = P2 >> 8;
|
||||
si5351_pll_data[7] = P2;
|
||||
si5351_SendPLLBRegisterBulk();
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111000); //CLK2_EN=en, CLK1_EN, CLK0_EN
|
||||
}
|
||||
|
||||
volatile bool usb = true;
|
||||
volatile bool change = true;
|
||||
volatile int32_t freq = 7074000;
|
||||
|
|
@ -446,67 +299,11 @@ volatile int32_t freq = 7074000;
|
|||
volatile uint8_t tx = 0;
|
||||
volatile bool vox_enable = false;
|
||||
|
||||
//volatile uint8_t vox_hangtime = 1;
|
||||
/*
|
||||
inline void vox(bool vox_trigger)
|
||||
{
|
||||
switch(vox_hangtime){
|
||||
case 0: // step 1: VOX triggered -> TX on, minimum initial hangtime
|
||||
if(vox_trigger){
|
||||
vox_hangtime = 2;
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
digitalWrite(RX, LOW); // TX
|
||||
}
|
||||
return 0;
|
||||
case 1: // step 3: VOX not triggered recently (hangtime exceeded) -> TX off
|
||||
vox_hangtime--;
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
return 0;
|
||||
default: // step 2: still VOX triggered -> reset hangtime
|
||||
vox_hangtime = (vox_trigger) ? 255 : vox_hangtime - 1; // 255/F_SAMP = 50ms ( =~ 15 300Hz periods)
|
||||
break;
|
||||
}
|
||||
#ifdef notdef
|
||||
if(vox_trigger) vox_hangtime++; else vox_hangtime--;
|
||||
switch(vox_hangtime){
|
||||
case 0: vox_hangtime++; break; // clip to lower bound
|
||||
case 3: // negative strobe : transit from TX to RX
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
vox_hangtime = 1;
|
||||
break;
|
||||
case 2: // positive strobe : transit from RX to TX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
digitalWrite(RX, LOW); // TX
|
||||
vox_hangtime = 254; // hangtime = 254 / 4402 = 58ms (the time that TX at least stays on when not further triggered)
|
||||
break;
|
||||
case 255: vox_hangtime--; break; // clip to upper bound
|
||||
}
|
||||
#endif
|
||||
#ifdef notdef
|
||||
vox_hangtime += (vox_trigger) ? 1 : -1;
|
||||
switch(vox_hangtime){
|
||||
case 0: vox_hangtime++; break; // clip to lower bound
|
||||
case 3: // negative strobe : transit from TX to RX
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
vox_hangtime = 1;
|
||||
break;
|
||||
case 2: // positive strobe : transit from RX to TX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
digitalWrite(RX, LOW); // TX
|
||||
vox_hangtime = 254;
|
||||
break;
|
||||
case 255: vox_hangtime--; break; // clip to upper bound
|
||||
}
|
||||
#endif
|
||||
}
|
||||
*/
|
||||
inline void vox(bool trigger)
|
||||
{
|
||||
if(trigger){
|
||||
if(!tx){
|
||||
lcd.setCursor(15,1); lcd.print("T");
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
digitalWrite(RX, LOW); // TX
|
||||
}
|
||||
|
|
@ -517,6 +314,7 @@ inline void vox(bool trigger)
|
|||
if(!tx){
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
lcd.setCursor(15,1); lcd.print("V");
|
||||
}
|
||||
}
|
||||
}
|
||||
|
|
@ -527,16 +325,6 @@ volatile uint8_t drive = 4;
|
|||
#define _UA (4401) //360 // unit angle; integer representation of one full circle turn or 2pi radials or 360 degrees, should be a integer divider of F_SAMP and maximized to have higest precision
|
||||
#define MAX_DP (_UA/1) //(_UA/2) // the occupied SSB bandwidth can be further reduced by restricting the maximum phase change (set MAX_DP to _UA/2).
|
||||
|
||||
inline int16_t arctan2(int8_t q, int8_t i) // error ~ 5 degree
|
||||
{ // source: https://dspguru.com/dsp/tricks/fixed-point-atan2-with-self-normalization/
|
||||
int16_t phase;
|
||||
if(i < 0)
|
||||
phase = ((_UA*3)/8) - (_UA*1/8) * (i + abs(q)) / ((abs(q) - i) == 0 ? 1 : (abs(q) - i));
|
||||
else
|
||||
phase = (_UA*1/8) - (_UA*1/8) * (i - abs(q)) / ((i + abs(q)) == 0 ? 1 : (i + abs(q)));
|
||||
return (q < 0) ? -phase : phase; // negate if in quad III or IV
|
||||
}
|
||||
|
||||
inline int16_t arctan3(int16_t q, int16_t i) // error ~ 0.8 degree
|
||||
{ // source: [1] http://www-labs.iro.umontreal.ca/~mignotte/IFT2425/Documents/EfficientApproximationArctgFunction.pdf
|
||||
#define _atan2(z) (_UA/8 - _UA/22 * z + _UA/22) * z //derived from (5) [1]
|
||||
|
|
@ -551,6 +339,7 @@ inline int16_t arctan3(int16_t q, int16_t i) // error ~ 0.8 degree
|
|||
}
|
||||
|
||||
uint8_t lut[256];
|
||||
volatile uint8_t amp;
|
||||
|
||||
inline int16_t ssb(int16_t in)
|
||||
{
|
||||
|
|
@ -558,63 +347,27 @@ inline int16_t ssb(int16_t in)
|
|||
|
||||
int16_t i, q;
|
||||
uint8_t j;
|
||||
// static int8_t v[27];
|
||||
// for (j = 0; j != 26; j++)
|
||||
// static int16_t v[24];
|
||||
// for (j = 0; j != 23; j++)
|
||||
static int16_t v[16];
|
||||
for (j = 0; j != 15; j++)
|
||||
v[j] = v[j+1];
|
||||
// v[26] = in;
|
||||
// v[23] = in;// - prev_in;
|
||||
// v[15] = in;// - prev_in;
|
||||
// prev_in = in;
|
||||
|
||||
prev_in += (in - prev_in) / 2;
|
||||
v[15] = in - prev_in; // DC decoupling
|
||||
|
||||
|
||||
// i = v[13];
|
||||
// q = ((v[0]-v[26]) + (v[2]-v[24]) + (v[4]-v[22])*2 + (v[6]-v[20])*4 + (v[8]-v[18])*5 + (v[10]-v[16])*10 + (v[12]-v[14])*32) / 50;
|
||||
|
||||
// i = v[11];
|
||||
// q = ((v[0]-v[22]) + (v[2]-v[20])*3 + (v[4]-v[18])*6 + (v[6]-v[16])*12 + (v[8]-v[14])*24 + (v[10]-v[12])*80) / 128; // Hilbert transform, 40dB side-band rejection in 250..1950Hz (4402 SPS) when used in image-rejection scenario
|
||||
|
||||
i = v[7];
|
||||
q = ((v[0]-v[14])*2 + (v[2]-v[12])*8 + (v[4]-v[10])*21 + v[6]*79 - v[8]*79) / 128; // Hilbert transform, 40dB side-band rejection in 400..1900Hz (4402 SPS) when used in image-rejection scenario
|
||||
|
||||
#ifdef notdef
|
||||
uint16_t amp = (abs(i) + abs(q)); // approximation of: amp = sqrt(i*i + q*q);
|
||||
amp *= drive; //scale so that input amplitude is full scale; drive=4 seems a good drive
|
||||
uint16_t _amp = abs(i) > abs(q) ? abs(i) + abs(q)/4 : abs(q) + abs(i)/4; // approximation of: amp = sqrt(i*i + q*q); error 0.95dB
|
||||
|
||||
// Based on amplitude set the PA voltage through PWM. The following voltages at L4 have been measured for various PWM values: 0x00 (0.48V), 0x10 (0.50V), 0x1A (0.54V), 0x1D (0.66V), 0x20 (3.4-7V), 0x30 (6.5-11V), 0x40 (9.96V), 0x60 (11V), 0x80 (11.5V), 0xFF (11.8V)
|
||||
#define KEY_OUT_PWM_MIN 0x1D // The PWM (threshold) value where the voltage over L4 just start rising ~0.6V
|
||||
#define KEY_OUT_PWM_MAX 0x60 // The PWM value where the maximum voltage over L4 is approximated ~11V
|
||||
|
||||
if(drive == 0) // constant-carrier SSB
|
||||
OCR1BL = 0xFF;
|
||||
else {
|
||||
//if(amp > KEY_OUT_PWM_MAX) OCR1BL = 255; else
|
||||
//if(amp < KEY_OUT_PWM_MIN) OCR1BL = 0; else
|
||||
OCR1BL = amp / (0xFF/(KEY_OUT_PWM_MAX - KEY_OUT_PWM_MIN)) + KEY_OUT_PWM_MIN; // Set PWM amplitude at OC1B (KEY_OUT) in the working range of the PA supply (1 to 11V) --> the current implmentation is quite crude: it would be nice if we can linearize this via a calibration technique
|
||||
}
|
||||
#endif
|
||||
//uint16_t amp = (abs(i) + abs(q)); // approximation of: amp = sqrt(i*i + q*q);
|
||||
uint16_t amp = abs(i) > abs(q) ? abs(i) + abs(q)/4 : abs(q) + abs(i)/4; // approximation of: amp = sqrt(i*i + q*q); error 0.95dB
|
||||
//uint16_t amp = abs(i) > abs(q) ? abs(i) + 3*abs(q)/8 : abs(q) + 3*abs(i)/8; // approximation of: amp = sqrt(i*i + q*q); error 0.57dB
|
||||
|
||||
//#define VOX_THRESHOLD 4
|
||||
//if(vox_enable) vox(((int8_t)(v[1]+v[6]+v[13]+v[17]+v[22]) > VOX_THRESHOLD));
|
||||
#define VOX_THRESHOLD (1 << 1) // 1*6=6dB above ADC noise level
|
||||
if(vox_enable) vox((amp > VOX_THRESHOLD));
|
||||
if(vox_enable) vox((_amp > VOX_THRESHOLD));
|
||||
|
||||
//if(amp < 16) amp = 0;
|
||||
amp = amp << drive;
|
||||
amp = ((amp > 255) || (drive == 8)) ? 255 : amp;
|
||||
OCR1BL = (tx) ? lut[amp] : 0;
|
||||
_amp = _amp << drive;
|
||||
_amp = ((_amp > 255) || (drive == 8)) ? 255 : _amp; // clip or when drive=8 use max output
|
||||
amp = (tx) ? lut[_amp] : 0;
|
||||
OCR1BL = amp; // submit amplitude to PWM register
|
||||
|
||||
static int16_t prev_phase;
|
||||
//int16_t phase = arctan2(q, i);
|
||||
int16_t phase = arctan3(q, i);
|
||||
int16_t dp = phase - prev_phase; // phase difference and restriction
|
||||
prev_phase = phase;
|
||||
|
|
@ -626,10 +379,8 @@ inline int16_t ssb(int16_t in)
|
|||
}
|
||||
|
||||
if(usb)
|
||||
//return dp * F_SAMP/_UA; // calculate frequency-difference based on phase-difference
|
||||
return dp * ( F_SAMP/_UA); // calculate frequency-difference based on phase-difference
|
||||
else
|
||||
//return dp * -F_SAMP/_UA;
|
||||
return dp * (-F_SAMP/_UA);
|
||||
}
|
||||
|
||||
|
|
@ -640,8 +391,6 @@ volatile uint16_t numSamples = 0;
|
|||
// It performs in real-time the ADC sampling, calculation of SSB phase-differences, calculation of SI5351 frequency registers and send the registers to SI5351 over I2C.
|
||||
ISR(ADC_vect) // ADC conversion interrupt
|
||||
{ // jitter dependent things first
|
||||
//#define RXADC 1
|
||||
#ifndef RXADC
|
||||
si5351_SendPLLBRegisterBulk(); // submit frequency registers to SI5351 over ~840kbit/s I2C
|
||||
uint8_t low = ADCL; // ADC sample 10-bits analog input, first ADCL, then ADCH
|
||||
uint8_t high = ADCH;
|
||||
|
|
@ -649,69 +398,8 @@ ISR(ADC_vect) // ADC conversion interrupt
|
|||
int16_t df = ssb(adc >> MIC_ATTEN); // convert analog input into phase-shifts (carrier out by periodic frequency shifts)
|
||||
si5351_freq_calc_fast(df); // calculate SI5351 registers based on frequency shift and carrier frequency
|
||||
numSamples++;
|
||||
#else
|
||||
uint8_t low = ADCL; // ADC sample 10-bits analog input, first ADCL, then ADCH
|
||||
uint8_t high = ADCH;
|
||||
int16_t in = ((high << 8) | low) - 512;
|
||||
process(in);
|
||||
numSamples++;
|
||||
#endif
|
||||
}
|
||||
|
||||
///// RX ADC specific processing code
|
||||
volatile uint16_t amp;
|
||||
volatile int16_t phase;
|
||||
inline void process(int16_t in)
|
||||
{
|
||||
static int16_t prev_in;
|
||||
int16_t i, q;
|
||||
uint8_t j;
|
||||
static int16_t v[16];
|
||||
|
||||
for (j = 0; j != 15; j++)
|
||||
v[j] = v[j+1];
|
||||
prev_in += (in - prev_in) / 2;
|
||||
v[15] = in - prev_in; // DC decoupling
|
||||
|
||||
i = v[7];
|
||||
q = ((v[0]-v[14])*2 + (v[2]-v[12])*8 + (v[4]-v[10])*21 + v[6]*79 - v[8]*79) / 128; // Hilbert transform, 40dB side-band rejection in 400..1900Hz (4402 SPS) when used in image-rejection scenario
|
||||
|
||||
amp = abs(i) > abs(q) ? abs(i) + abs(q)/4 : abs(q) + abs(i)/4; // approximation of: amp = sqrt(i*i + q*q); error 0.95dB
|
||||
//_phase = (360 * (arctan3(q, i) - 0)) / _UA; // 1000 = (2*M_PI*1000*_UA)/(F_SAMP*2*M_PI);
|
||||
if((numSamples % 4) == 0) phase = arctan2(q, i);
|
||||
}
|
||||
void test_phase()
|
||||
{
|
||||
adc_start(0, false);
|
||||
|
||||
si5351_prev_pll_freq = 0; //enforce PLL reset
|
||||
si5351_freq(freq, 0, 90); // RX in USB
|
||||
si5351_alt_clk2(freq + 1101); // si5351_freq_clk2(freq + 1000);
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111000); // CLK2_EN=1, CLK1_EN,CLK0_EN=1
|
||||
digitalWrite(RX, LOW); // TX
|
||||
|
||||
int16_t j;
|
||||
for(j = 64; j >= 0; j-=1) // determine amp for PWM value i
|
||||
{
|
||||
OCR1BL = j;
|
||||
int x; for(x=0;x!=500;x++) delay(100);
|
||||
cli();
|
||||
uint16_t _amp = amp;
|
||||
int16_t _phase = phase;
|
||||
uint16_t _numSamples = numSamples;
|
||||
sei();
|
||||
lcd.setCursor(0,1); lcd.print(_amp); lcd.print(" "); lcd.print((int)((_phase/12.225 + 180) - _numSamples*0.012) % 360);
|
||||
lcd.print(" ");
|
||||
}
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
change=true; //restore original frequency setting
|
||||
|
||||
adc_stop();
|
||||
}
|
||||
//end RX ADC specific code
|
||||
//////////////////
|
||||
|
||||
ISR (TIMER0_COMPB_vect) // Timer0 interrupt
|
||||
{
|
||||
ADCSRA |= (1 << ADSC); // start ADC conversion (triggers ADC interrupt)
|
||||
|
|
@ -724,6 +412,7 @@ uint8_t old_TIMSK0;
|
|||
|
||||
void adc_start(uint8_t adcpin, uint8_t ref1v1)
|
||||
{
|
||||
// Setup ADC
|
||||
DIDR0 |= (1 << adcpin); // disable digital input
|
||||
ADCSRA = 0; // clear ADCSRA register
|
||||
ADCSRB = 0; // clear ADCSRB register
|
||||
|
|
@ -737,7 +426,7 @@ void adc_start(uint8_t adcpin, uint8_t ref1v1)
|
|||
ADCSRA |= (1 << ADPS1) | (1 << ADPS0); // ADPS=011: 8 prescaler for 153.8 KHz; sampling rate is [ADC clock] / [prescaler] / [conversion clock cycles] for Arduino Uno ADC clock is 20 MHz and a conversion takes 13 clock cycles: ADPS=011: 8 prescaler for 153.8 KHz, ADPS=100: 16 prescaler for 76.9 KHz; ADPS=101: 32 prescaler for 38.5 KHz; ADPS=110: 64 prescaler for 19.2kHz; // ADPS=111: 128 prescaler for 9.6kHz
|
||||
ADCSRA |= (1 << ADIE); // enable interrupts when measurement complete
|
||||
ADCSRA |= (1 << ADEN); // enable ADC
|
||||
ADCSRA |= (1 << ADSC); // start ADC measurements
|
||||
//ADCSRA |= (1 << ADSC); // start ADC measurements
|
||||
|
||||
// backup Timer 0, is used by delay(), micros(), etc.
|
||||
old_TCCR0A = TCCR0A;
|
||||
|
|
@ -762,14 +451,12 @@ void adc_start(uint8_t adcpin, uint8_t ref1v1)
|
|||
TCCR1B |= ((1 << CS10) | (1 << WGM13)); // WGM13: Mode 8 - PWM, Phase and Frequency Correct; CS10: clkI/O/1 (No prescaling)
|
||||
ICR1H = 0x00; // TOP. This sets the PWM frequency: PWM_FREQ=312.500kHz ICR=0x1freq bit_depth=5; PWM_FREQ=156.250kHz ICR=0x3freq bit_depth=6; PWM_FREQ=78.125kHz ICR=0x7freq bit_depth=7; PWM_FREQ=39.250kHz ICR=0xFF bit_depth=8
|
||||
ICR1L = 0xFF; // Fpwm = F_CPU / (2 * Prescaler * TOP) : PWM_FREQ = 39.25kHz, bit-depth=8
|
||||
OCR1BH = 0x00;
|
||||
OCR1BL = 0x00; // PWM duty-cycle (span set by ICR).
|
||||
OCR1BH = 0;
|
||||
OCR1BL = 0; // PWM duty-cycle (span set by ICR).
|
||||
}
|
||||
|
||||
void adc_stop()
|
||||
{
|
||||
OCR1BL = 0x00;
|
||||
|
||||
{
|
||||
// restore Timer 0, is shared with delay(), micros(), etc.
|
||||
TCCR0A = old_TCCR0A;
|
||||
TCCR0B = old_TCCR0B;
|
||||
|
|
@ -779,8 +466,10 @@ void adc_stop()
|
|||
// Stop Timer 0 interrupt
|
||||
//TIMSK0 &= ~(1 << OCIE0B); // disable timer compare interrupt TIMER0_COMPB_vect
|
||||
//TCCR0A |= (1 << WGM00); // for some reason WGM00 must be 1 in normal operation
|
||||
|
||||
OCR1BL = 0x00;
|
||||
|
||||
ADCSRA &= ~(1 << ADATE); // disable auto trigger
|
||||
//ADCSRA &= ~(1 << ADATE); // disable auto trigger
|
||||
ADCSRA &= ~(1 << ADIE); // disable interrupts when measurement complete
|
||||
ADCSRA |= (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0); // 128 prescaler for 9.6kHz
|
||||
|
||||
|
|
@ -811,7 +500,7 @@ void encoder_vect(int8_t sign)
|
|||
}
|
||||
if(stepval < STEP_100) freq %= 1000; // when tuned and stepsize > 100Hz then forget fine-tuning details
|
||||
freq += sign * stepval;
|
||||
freq = max(1, min(99999999, freq));
|
||||
freq = max(1, min(999999999, freq));
|
||||
change = true;
|
||||
}
|
||||
|
||||
|
|
@ -891,45 +580,20 @@ uint32_t sample_amp(uint8_t pin)
|
|||
uint32_t rms = 0;
|
||||
uint16_t i;
|
||||
for(i=0; i!=16; i++){
|
||||
//for(i=0; i!=128; i++){
|
||||
uint16_t adc = analogRead(pin);
|
||||
avg = (avg + adc) / 2;
|
||||
}
|
||||
for(i=0; i!=128; i++){ // 128 overampling is 42dB gain, with 10-but ADC a total of 102dB DR
|
||||
for(i=0; i!=128; i++){ // 128 overampling is 42dB gain => with 10-bit ADC resulting in a total of 102dB DR
|
||||
uint16_t adc = analogRead(pin);
|
||||
avg = (avg + adc) / 2;
|
||||
rms += ((adc > avg) ? 1 : -1) * (adc - avg);
|
||||
avg = (avg + adc) / 2; // average
|
||||
rms += ((adc > avg) ? 1 : -1) * (adc - avg); // rectify based
|
||||
}
|
||||
return rms;
|
||||
}
|
||||
|
||||
void test_iq()
|
||||
{
|
||||
si5351_prev_pll_freq = 0; //enforce PLL reset
|
||||
si5351_freq(freq, 0, 90); // RX in USB
|
||||
digitalWrite(SIG_OUT, true); // loopback on
|
||||
int16_t df;
|
||||
|
||||
lcd.setCursor(0,0); lcd.print(blanks);
|
||||
for(df = 0; df < 3000; df += 100)
|
||||
{
|
||||
lcd.setCursor(0,0); lcd.print(df); lcd.print("Hz");
|
||||
si5351_freq_clk2(freq+df); //TX in USB
|
||||
delay(300);
|
||||
float amp_usb = sample_amp(AUDIO2);
|
||||
si5351_freq_clk2(freq-df); //TX in LSB
|
||||
delay(600);
|
||||
float amp_lsb = sample_amp(AUDIO2);
|
||||
lcd.setCursor(7,0); lcd.print(20.0*log10(amp_lsb/amp_usb)); lcd.print("dB"); lcd.print(blanks);
|
||||
wdt_reset();
|
||||
}
|
||||
lcd.print(blanks);
|
||||
|
||||
digitalWrite(SIG_OUT, false); // loopback off
|
||||
}
|
||||
|
||||
void test_amp()
|
||||
{
|
||||
lcd.setCursor(9,0); lcd.print(" ");
|
||||
TCCR1A = 0; // Timer 1: PWM mode
|
||||
TCCR1B = 0;
|
||||
TCCR1A |= (1 << COM1B1); // Clear OC1A/OC1B on Compare Match when upcounting. Set OC1A/OC1B on Compare Match when downcounting.
|
||||
|
|
@ -939,29 +603,31 @@ void test_amp()
|
|||
OCR1BH = 0x00;
|
||||
OCR1BL = 0x00; // PWM duty-cycle (span set by ICR).
|
||||
|
||||
//freq= 7096800;
|
||||
si5351_prev_pll_freq = 0; // enforce PLL reset
|
||||
si5351_freq(freq, 0, 90); // RX in USB
|
||||
si5351_freq_clk2(freq);
|
||||
si5351_alt_clk2(freq);
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
digitalWrite(RX, LOW); // TX
|
||||
uint16_t i;
|
||||
for(i = 0; i != 256; i++)
|
||||
{
|
||||
OCR1BL = lut[i];
|
||||
si5351_freq_clk2(freq + i*10);
|
||||
si5351_alt_clk2(freq + i*10);
|
||||
wdt_reset();
|
||||
lcd.setCursor(0,1); lcd.print("SWEEP("); lcd.print(i); lcd.print(")="); lcd.print(lut[i]); lcd.print(" ");
|
||||
delay(200);
|
||||
}
|
||||
|
||||
OCR1BL = 0x00;
|
||||
OCR1BL = 0;
|
||||
delay(500);
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
change = true; //restore original frequency setting
|
||||
}
|
||||
|
||||
void test_calibrate()
|
||||
{
|
||||
lcd.setCursor(9,0); lcd.print(" ");
|
||||
TCCR1A = 0; // Timer 1: PWM mode
|
||||
TCCR1B = 0;
|
||||
TCCR1A |= (1 << COM1B1); // Clear OC1A/OC1B on Compare Match when upcounting. Set OC1A/OC1B on Compare Match when downcounting.
|
||||
|
|
@ -971,7 +637,6 @@ void test_calibrate()
|
|||
OCR1BH = 0x00;
|
||||
OCR1BL = 0x00; // PWM duty-cycle (span set by ICR).
|
||||
|
||||
//freq= 7096800;
|
||||
si5351_prev_pll_freq = 0; //enforce PLL reset
|
||||
si5351_freq(freq, 0, 90); // RX in USB
|
||||
si5351_alt_clk2(freq + 1000); // si5351_freq_clk2(freq + 1000);
|
||||
|
|
@ -981,8 +646,6 @@ void test_calibrate()
|
|||
delay(200);
|
||||
float scale = sample_amp(AUDIO2);
|
||||
wdt_reset();
|
||||
//OCR1BL = 0x00;
|
||||
//delay(200);
|
||||
uint8_t amp[256];
|
||||
int16_t i,j;
|
||||
for(i = 127; i >= 0; i--) // determine amp for pwm value i
|
||||
|
|
@ -992,8 +655,7 @@ void test_calibrate()
|
|||
delay(100);
|
||||
|
||||
amp[i] = min(255, (float)sample_amp(AUDIO2) * 255.0/scale);
|
||||
lcd.setCursor(0,1); lcd.print(""); lcd.print(i); lcd.print(" "); lcd.print(amp[i]); lcd.print(" ");
|
||||
//if(amp[i] == 255) break; // skip rest when peak RF reached
|
||||
lcd.setCursor(0,1); lcd.print("CALIB("); lcd.print(i); lcd.print(")="); lcd.print(amp[i]); lcd.print(" ");
|
||||
}
|
||||
OCR1BL = 0xFF; // Max power to determine scale
|
||||
delay(200);
|
||||
|
|
@ -1007,119 +669,31 @@ void test_calibrate()
|
|||
OCR1BL = 0x00;
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
change=true; //restore original frequency setting
|
||||
change = true; //restore original frequency setting
|
||||
}
|
||||
|
||||
/*
|
||||
byte blackonwhite = true;
|
||||
static byte canvas_bitmaps[2*4][9]; // 4x2 custom char 6x9 (actual visual char 5x8)
|
||||
inline void canvas_init()
|
||||
{ int i;
|
||||
lcd.clear();
|
||||
for(i = 0; i != 4*2; i++){
|
||||
if((i%4) == 0) lcd.setCursor(16/2 - 4/2, i/4);
|
||||
lcd.write(i+1);
|
||||
}
|
||||
}
|
||||
inline void canvas_clear()
|
||||
{ int i,j;
|
||||
for(i = 0; i != 8; i++) for(j = 0; j != 8; j++) canvas_bitmaps[i][j] = (blackonwhite) ? 0b11111 : 0b00000;
|
||||
}
|
||||
inline void canvas_plot(int8_t x, int8_t y){ //maps canvas (4*6-1 x 2*9-1) 23x17 to custom char
|
||||
if(x<0 || y<0 || x>(4*6-1) || y>(2*9-1)) return;
|
||||
x = x + 1;
|
||||
y = (2*9-1 - 1) - y;
|
||||
if(blackonwhite)
|
||||
canvas_bitmaps[4*(y/9) + (x/6)][(y%9)] &= ~(1 << ((6-1) - (x%6))); //black dot
|
||||
else
|
||||
canvas_bitmaps[4*(y/9) + (x/6)][(y%9)] |= 1 << ((6-1) - (x%6)); //white dot
|
||||
}
|
||||
|
||||
#include <float.h>
|
||||
inline void canvas_graph(float arr[])
|
||||
void customDelay(uint32_t _micros) //_micros=100000 is 132052us delay
|
||||
{
|
||||
int i;
|
||||
float arrmax = -FLT_MAX;
|
||||
float arrmin = FLT_MAX;
|
||||
for(i=0;i!=(4*6);i++){
|
||||
arrmax = max(arrmax, arr[i]);
|
||||
arrmin = min(arrmin, arr[i]);
|
||||
}
|
||||
float scale = (float)(arrmax-arrmin) / (float)(2*9);
|
||||
for(i=0;i!=(4*6);i++){ //scale down y and canvas_plot
|
||||
canvas_plot( i, (float)(arr[i] - arrmin) / scale );
|
||||
}
|
||||
lcd.setCursor(0,0); lcd.print(" ");
|
||||
lcd.setCursor(0,0); lcd.print(arrmax-arrmin);
|
||||
lcd.setCursor(0,1); lcd.print(" ");
|
||||
lcd.setCursor(0,1); lcd.print(arrmin);
|
||||
uint32_t i; for(i=0;i!=_micros*3;i++) wdt_reset();
|
||||
}
|
||||
inline void canvas_blit()
|
||||
{ int i;
|
||||
for(i = 0; i != 8; i++) lcd.createChar(i + 1, canvas_bitmaps[i]);
|
||||
}
|
||||
void test_scope()
|
||||
{
|
||||
digitalWrite(SIG_OUT, true); // loopback on
|
||||
si5351_prev_pll_freq = 0; //enforce PLL reset
|
||||
si5351_freq(freq, 0, 90); // RX in USB
|
||||
si5351_freq_clk2(freq + 1024);
|
||||
canvas_init();
|
||||
|
||||
for(;;)
|
||||
{
|
||||
uint8_t x;
|
||||
float arr[4*6];
|
||||
canvas_clear();
|
||||
//
|
||||
uint32_t fx = freq;
|
||||
for(x=0; x!=(4*6); x++){
|
||||
si5351_prev_pll_freq = 0; //enforce PLL reset
|
||||
si5351_freq(fx, 0, 90); // RX in USB
|
||||
si5351_freq_clk2(fx + 1024);
|
||||
delay(100);
|
||||
arr[x] = 20.0*log10((float)sample_amp(AUDIO1)) - 110.0;
|
||||
fx += 100000;
|
||||
wdt_reset();
|
||||
}
|
||||
//for(;(micros() % 1024) > 9;); for(x=0; x<(4*6); x++) arr[x] = analogRead(AUDIO1); //simple scope
|
||||
canvas_graph(arr);
|
||||
canvas_blit();
|
||||
wdt_reset();
|
||||
}
|
||||
|
||||
digitalWrite(SIG_OUT, false); // loopback off
|
||||
}
|
||||
|
||||
void test_samplerate()
|
||||
{
|
||||
noInterrupts(); // report actual sample-rate: measure number of samples/s
|
||||
long n0 = numSamples;
|
||||
interrupts();
|
||||
delay(1000);
|
||||
noInterrupts();
|
||||
long n1 = numSamples;
|
||||
i2c_suspend(); //recover from I2C before doing any LCD operation
|
||||
lcd.setCursor(0,0); lcd.print(n1 - n0); // do not forget to correct this value with *1.25 because actual F_CPU=20M on QCX
|
||||
lcd.print(" ");
|
||||
i2c_resume(); //prepare for I2C after LCD operation
|
||||
interrupts();
|
||||
}
|
||||
*/
|
||||
|
||||
void smeter()
|
||||
{
|
||||
//float dbm = 20.0 * log10(sample_amp(AUDIO1)) - 102.0;
|
||||
float rms = ((float)sample_amp(AUDIO1)) * 5.0 / (1024.0*128.0*100.0*120.0); // actual voltage at ADC, minus ADC DR, processing gain, receiver gain, audio gain
|
||||
float dbm = 10 * log10((rms*rms) / 50.0) + 30.0; //from rmsV to dBM at 50R
|
||||
lcd.setCursor(10,0); lcd.print((int8_t)dbm); lcd.print("dBm ");
|
||||
float rms = ((float)sample_amp(AUDIO1)) * 5.0 / (1024.0 * 128.0 * 100.0 * 120.0/1.750); // rmsV = ADC value * AREF / [ADC DR * processing gain * receiver gain * audio gain]
|
||||
float dbm = 10.0*log10((rms*rms) / 50.0) + 30.0; //from rmsV to dBm at 50R
|
||||
static float dbm_max;
|
||||
dbm_max = max(dbm_max, dbm);
|
||||
static uint8_t cnt;
|
||||
cnt++;
|
||||
if((cnt % 8) == 0){
|
||||
lcd.setCursor(9,0); lcd.print((int16_t)dbm_max); lcd.print("dBm ");
|
||||
dbm_max = -174.0 + 34.0;
|
||||
}
|
||||
}
|
||||
|
||||
void setup()
|
||||
{
|
||||
#ifndef RXADC
|
||||
wdt_enable(WDTO_2S); // Enable watchdog, resolves QCX startup issue
|
||||
#endif
|
||||
|
||||
lcd.begin(16, 2);
|
||||
lcd.createChar(1, font_run);
|
||||
|
|
@ -1130,26 +704,30 @@ void setup()
|
|||
encoder_setup();
|
||||
|
||||
qcx_setup();
|
||||
|
||||
|
||||
numSamples = 0; // DO NOT remove this volatile variable
|
||||
//PCICR |= (1 << PCIE0);
|
||||
//PCMSK0 |= (1 << PCINT5) | (1 << PCINT4) | (1 << PCINT3);
|
||||
//interrupts();
|
||||
|
||||
delay(1000);
|
||||
lcd.setCursor(7,0); lcd.print("\001"); lcd.print(blanks); // display initialization complete
|
||||
|
||||
|
||||
// initialize LUT
|
||||
// Based on amplitude set the PA voltage through PWM. The following voltages at L4 have been measured for various PWM values: 0x00 (0.48V), 0x10 (0.50V), 0x1A (0.54V), 0x1D (0.66V), 0x20 (3.4-7V), 0x30 (6.5-11V), 0x40 (9.96V), 0x60 (11V), 0x80 (11.5V), 0xFF (11.8V)
|
||||
#define KEY_OUT_PWM_MIN 29 // The PWM (threshold) value where the voltage over L4 just start rising ~0.6V
|
||||
#define KEY_OUT_PWM_MAX 96 // The PWM value where the maximum voltage over L4 is approximated ~11V
|
||||
|
||||
uint16_t i;
|
||||
for(i=0; i!=256; i++)
|
||||
//lut[i] = i / (255/(KEY_OUT_PWM_MAX - KEY_OUT_PWM_MIN)) + KEY_OUT_PWM_MIN; // WITH C31 deployed
|
||||
lut[i] = i; // WITHOUT C31 deployed
|
||||
|
||||
numSamples = 0; // DO NOT remove this volatile variable
|
||||
// Benchmark ADC_vect ISR
|
||||
uint32_t t0, t1;
|
||||
t0 = micros();
|
||||
TIMER0_COMPB_vect();
|
||||
ADC_vect();
|
||||
t1 = micros();
|
||||
float load = (t1-t0) * F_SAMP * 100.0 / 1000000.0;
|
||||
lcd.setCursor(0,1); lcd.print("CPU_tx="); lcd.print(load); lcd.print("%");
|
||||
|
||||
// Ready
|
||||
delay(1000);
|
||||
lcd.setCursor(7,0); lcd.print("\001"); lcd.print(blanks); // display initialization complete
|
||||
lcd.setCursor(15,1); lcd.print("R");
|
||||
}
|
||||
|
||||
void loop()
|
||||
|
|
@ -1159,16 +737,18 @@ void loop()
|
|||
smeter();
|
||||
|
||||
if(!digitalRead(DIT)){
|
||||
lcd.setCursor(15,1); lcd.print("T");
|
||||
lcd.setCursor(15,1); lcd.print("T");
|
||||
lcd.setCursor(9,0); lcd.print(" ");
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111011); // CLK2_EN=1, CLK1_EN,CLK0_EN=0
|
||||
adc_start(2, true);
|
||||
customDelay(1000); //allow setup time
|
||||
digitalWrite(RX, LOW); // TX
|
||||
tx = 1;
|
||||
for(;!digitalRead(DIT);){ //until depressed
|
||||
//test_samplerate();
|
||||
wdt_reset();
|
||||
}
|
||||
digitalWrite(RX, HIGH); // RX
|
||||
customDelay(1000); //allow setup time
|
||||
tx = 0;
|
||||
adc_stop();
|
||||
si5351_SendRegister(SI_CLK_OE, 0b11111100); // CLK2_EN=0, CLK1_EN,CLK0_EN=1
|
||||
|
|
@ -1184,21 +764,23 @@ void loop()
|
|||
wdt_reset();
|
||||
}
|
||||
delay(10); //debounce
|
||||
for(;!longpress && ((millis() - t0) < 500) && !doubleclick;){ //u ntil 2nd press or timeout
|
||||
for(;!longpress && ((millis() - t0) < 500) && !doubleclick;){ //until 2nd press or timeout
|
||||
doubleclick = digitalRead(BUTTONS);
|
||||
wdt_reset();
|
||||
}
|
||||
for(;digitalRead(BUTTONS);) wdt_reset(); //until depressed
|
||||
for(;digitalRead(BUTTONS);) wdt_reset(); // until depressed
|
||||
if(val < 852) { // Left-button ADC=772
|
||||
if(doubleclick){
|
||||
//test_linearity();
|
||||
return;
|
||||
}
|
||||
if(longpress){
|
||||
lcd.setCursor(15,1); lcd.print("V");
|
||||
lcd.setCursor(9,0); lcd.print(" ");
|
||||
vox_enable = true;
|
||||
adc_start(2, true);
|
||||
for(;!digitalRead(BUTTONS);) wdt_reset(); // until 2nd press
|
||||
for(;!digitalRead(BUTTONS);){ // while in VOX mode
|
||||
wdt_reset(); // until 2nd press
|
||||
}
|
||||
adc_stop();
|
||||
vox_enable = false;
|
||||
lcd.setCursor(15,1); lcd.print("R");
|
||||
|
|
@ -1211,22 +793,16 @@ void loop()
|
|||
change=true;
|
||||
} else if(val < 978) { // Right-button ADC=933
|
||||
if(doubleclick){
|
||||
//test_scope();
|
||||
#ifndef RXADC
|
||||
test_calibrate();
|
||||
#else
|
||||
test_phase();
|
||||
#endif
|
||||
return;
|
||||
}
|
||||
if(longpress){
|
||||
//test_iq();
|
||||
test_amp();
|
||||
return;
|
||||
}
|
||||
if(drive == 0) drive = 1;
|
||||
else drive += 1;
|
||||
if(drive>8) drive = 0;
|
||||
if(drive > 8) drive = 0;
|
||||
lcd.setCursor(0,1); lcd.print("Drive "); lcd.print(drive); lcd.print(blanks);
|
||||
} else { // Rotory-button ADC=1023
|
||||
if(doubleclick){
|
||||
|
|
|
|||
107
README.md
107
README.md
|
|
@ -17,7 +17,7 @@ pe1nnz@amsat.org
|
|||
|
||||
## List of features:
|
||||
- **[EER]/[Polar-transmitter] Class-E** driven SSB transmit-stage
|
||||
- Approximately **5W PEP SSB output** (depending on supply voltage, PA voltage regulated through PWM with **36dB dynamic range**)
|
||||
- Approximately **5W PEP SSB output** (depending on supply voltage, PA voltage regulated through PWM with **48dB dynamic range**)
|
||||
- supports **USB and LSB** modes up to **2200 Hz bandwidth** (receiver and transmitter)
|
||||
- Receiver unwanted side-band **rejection up to -20dB**
|
||||
- Continuously tunable through bands **80m-10m** (anything between 20kHz-99MHz is tunable but with degraded or loss in performance)
|
||||
|
|
@ -40,40 +40,11 @@ pe1nnz@amsat.org
|
|||
|
||||
|
||||
## Schematic:
|
||||
RX mod (step 1):
|
||||
```
|
||||
(CW filter) CW
|
||||
──┐ to IC9A/pin1 ────────o SW C21[]│
|
||||
┌┴┐ o─────────[]│────to LF amp
|
||||
│ │ (I/Q phase net) / +[]│
|
||||
│ │<────────────────────────o /
|
||||
└┬┘ to R27/pin2 SSB RX 3dB BW
|
||||
──┘ (200/2200Hz)
|
||||
```
|
||||
Audio-input mod (step 2-5, changes the DVM circuit):
|
||||
```
|
||||
5V┌──────────┐
|
||||
┌────────────┤AVCC 20 │
|
||||
│ 1.1V│ │
|
||||
D4│ R57┌───┤AREF │
|
||||
10K│ 10K│ │21 │
|
||||
┌┴┐ ┌┴┐ │ │
|
||||
│ │ │ │ │ATMEGA328P│ (Step 7 - only for ISP programming)
|
||||
│ │ │ │ │ QCX │ ┌─────────┐
|
||||
└┬┘ └┬┘ │ │ISP-2 │ Arduino │
|
||||
Paddle/Tip │ || │ │ RESET├───────────┤10 ├────[USB+cable to PC with Arduino
|
||||
┌──────────+───||───+───┤ADC2 │ISP-3 │ UNO │
|
||||
│Electret │R58|| │ │25 MOSI├───────────┤11 │
|
||||
│mic │ 220nF ┌┴┐ │ │ISP-6 │ │
|
||||
|O ──┴── │ │ │ MISO├───────────┤12 │
|
||||
│ ──┬── │ │ │ │ISP-4 │ │
|
||||
│ C42 │ R56└┬┘ │ SCK├───────────┤13 │ <-- runs ArduinoISP
|
||||
│ 10nF│ 10K │ │22 │ISP-1 │ │
|
||||
└──────────┴────────┴───┤GND GND├───────────┤GND │
|
||||
Paddle-jack/Sleeve └──────────┘ └─────────┘ AND... DO NOT FORGET TO CHANGE C31 & C32
|
||||
```
|
||||
Original QCX Schematic (click to zoom): ![QCX Schematic]
|
||||
The following changes below (marked in color) are made in the schematic (click to zoom), (see here the [original schematic]):
|
||||

|
||||
|
||||
This results in the following component and wiring changes (click to zoom):
|
||||

|
||||
|
||||
## Installation:
|
||||
You will need to install 4 wires, change 6 components and upload the firmware of this sketch:
|
||||
|
|
@ -84,9 +55,9 @@ You will need to install 4 wires, change 6 components and upload the firmware of
|
|||
4. Move C42 (10nF) to the backside of PCB and place it on the top pads of D4 and C42 that are closest to IC2
|
||||
5. Wire DVM/pin3-R57 to IC2/pin21 (AREF), wire junction D4-C42-R58 to IC2/pin18 (DAH), wire DVM/pin2 to IC2/pin20 (AVCC)
|
||||
6. Remove C31; and replace C32 with 10uF
|
||||
7. Connect an electret microphone (+/-) between Tip (DAH) and Sleeve (GND) of Paddle-jack, PTT-switch between Ring (DIT) and Sleeve (GND) (such as a [X1M-mic])
|
||||
7. Connect an electret microphone (+/-) between Tip (DAH) and Sleeve (GND) of Paddle-jack, PTT-switch between Ring (DIT) and Sleeve (GND) (such as a [X1M-mic]).
|
||||
8. Upload new firmware via an Arduino UNO board; install and start [Arduino] environment, connect Arduino Uno to your PC,
|
||||
upload QCX-SSB sketch and place the ATMEGA328P into the QCX. See also <sup>[5](#note5)</sup>.
|
||||
upload QCX-SSB sketch and place the ATMEGA328P into the QCX. See also <sup>[5](#note5)</sup> for an alternative upload method.
|
||||
|
||||
|
||||
## Operation:
|
||||
|
|
@ -97,15 +68,25 @@ Currently, the following functions have been assigned to the buttons:
|
|||
| LEFT single-press | LSB/USB-mode |
|
||||
| LEFT double-press | reserved |
|
||||
| LEFT long-press | VOX mode (for full-break-in or digital modes) |
|
||||
| CENTER single-press | Select frequency step |
|
||||
| CENTER single-press | Select (smaller) frequency step |
|
||||
| CENTER double-press | Select Band |
|
||||
| CENTER long-press | Select frequency step (reverse-direction) |
|
||||
| CENTER long-press | Select (larger) frequency step |
|
||||
| CENTER turn | Tune frequency |
|
||||
| RIGHT single-press | Set amplitude drive level on (8=constant carrier on TX) |
|
||||
| RIGHT double-press | Internal calibration of PA amplitude |
|
||||
| RIGHT double-press | (experimental!) Internal calibration of PA amplitude |
|
||||
| RIGHT long-press | Sweep over frequency 0..2550Hz and amplitude 0..100% |
|
||||
| KEY | Transmitter-keyed (PTT) |
|
||||
|
||||
Operating Instructions:
|
||||
|
||||
Tuning can be done by turning the rotary encoder. Its step size can be decreased or increased by a short or long press. A change of band can be done with a double press. The mode of operation is altered with a short press on the left button; this can be combined with changing S4 to change between wide-band (SSB) and small-band operation operation.
|
||||
|
||||
For SSB voice operation, adjust the amplitude drive by pressing right button to a level where voice peaks providing maximum power output (not more than that); this provides an acceptable IMD with good intelligability for local and normal distant operations. In cases where your signal is too weak, set the drive level to 8 to increase the average power output by using a constant amplitude-envelope; in some cases this might be just enough to put your signal above the noise-floor and make yourselve heard; note that this operation degrades the IMD considerably, but since this does not impact the intelligability and since these inter-modulation products are anyway below the noise-floor (and BW limited) they are not in the way, ie. they are not observable by the other station. For long duration QSOs on a specific frequency you can stop holding the PTT by enter (or leave) VOX mode with a long press on left button.
|
||||
|
||||
For FT8 (and any other digital) operation, select one of the pre-programmed FT8 bands by double press the rotary encoder, connect the headphone jack to sound card microphone jack, sound card speaker jack to microphone jack, and give a long press on left button to enter VOX mode. Adjust the sound card speaker volume to a minimum and start your favorite FT8 application (JTDX for instance).
|
||||
|
||||
To experiment with amplitude pre-distortion algorithm, double-press right button to train the PA amplitude characteristic. This sweeps the amplitude from maximum PWM to minimum PWM and measures the PA response through an internal receiver loopback and stores the values into volatile memory. Once trained, set the appropriate amplitude drive level for voice input. Pre-distorted amplitude response can be measured with a storage spectrum-analyser and a long-press of right button; it will sweep the pre-distorted amplitude from 0 to 100% in 255 steps, where each step has a 10Hz frequency offset.
|
||||
|
||||
|
||||
## Technical Description:
|
||||
For SSB reception the QCX CW filter is too small, therefore the first modification step 1 is to bypass the CW filter, providing a 3dB wideband passthrough of about 2kHz, this has side-effect that we loose 18dB audio-gain of the CW filter. Another way is to modify the CW-filter <sup>[2](#note2)</sup>, but this creates a steep filter-transition band. Insertion of a SPDT switch between the CW filter output, unfiltered output and the audio amplifier input may support CW and SSB mode selection. The phase-network is less efficient for the full SSB bandwidth in attenuating the unwanted side band, but overall a rejection of ~20 dB can still be achieved. LSB/USB mode switching is done by changing the 90 degree phase shift on the CLK1/CLK2 signals of the SI5351 PLL.
|
||||
|
|
@ -116,23 +97,41 @@ A new QCX-SSB firmware is uploaded to the ATMEGA328P (installation step 8), and
|
|||
|
||||
The amplitude of the complex-signal controls the supply-voltage of the PA, and thus the envelope of the SSB-signal. The key-shaping circuit is controlled with a 32kHz PWM signal, which can control the PA voltage from 0 to about 12V in 256 steps, providing a dynamic range of (log2(256) * 6 =) 48dB in the SSB signal. C31 is removed (installation step 6) to ensure that Q6 is operating as a digital switch, this improves the efficiency, thermal stability, linearity, dynamic range and response-time. Though the amplitude information is not mandatory to make a SSB signal intelligable, adding amplitude information improves quality. The complex-amplitude is also used in VOX-mode to determine when RX and TX transitions are supposed to be made.
|
||||
|
||||
The IMD performance is related dependent on the quality of the system: the linearity (accuracy) of the amplitude and phase response and the precision (dynamic range) of these quantities. Especially the DSP bit-width, the precision used in the DSP algorithms, the PWM and key-shaping circuit that supplies the PA and the PA phase response are critical. The following has been done to improve the quality (since v1.01): A. use a more accurate I/Q amplitude estimation algorithm; B. pre-distort, cancel out PA induced amplitude and (amplitude-dependent) phase-errors, the ssb generation algorithm applies a amplitude correction through a (amplitude) lookup in a predefined table before modulating.
|
||||
The IMD performance is related dependent on the quality of the system: the linearity (accuracy) of the amplitude and phase response and the precision (dynamic range) of these quantities. Especially the DSP bit-width, the precision used in the DSP algorithms, the PWM and key-shaping circuit that supplies the PA and the PA phase response are critical. Decreasing (or removing) C32 improves the IMD characteristics but at the cost of an increase of PWM products around the carrier. The following has been done to improve the quality (since R1.01): A. use a more accurate I/Q amplitude estimation algorithm; B. pre-distort, cancel out PA induced amplitude, the SSB generation algorithm applies a amplitude correction through a (amplitude) lookup in a predefined table before modulating. The following planned improvements are still to be done: C. to pre-distort, cancel out PA induced (amplitude-dependent) phase-errors (an experimental phase measurement algorithm can be found in here [commit phase-measurement-experiment]).
|
||||
|
||||
|
||||
## Results
|
||||
Several OMs reported a successful QCX-SSB modification and were able to make SSB QRP DX contacts over thousands of kilometers on the 20m and 40m bands. During CQ WW contest I was able to make 34 random QSOs on 40m with 5W and an inverted-V over the house in just a few hours with CN3A as my furthest contact, I could observe the benefits of using SSB with constant-envelope in cases where my signal was weak; for FT8 a Raspberry Pi 3B+ with JTDX was used to make FT8 contacts all the way up to NA.
|
||||
|
||||
Known issues:
|
||||
- R1.00: Audio quality especially in a local QSO setup with this release was a bit of a challenge due to analog operation of Q6, resulting in degraded IMD and thermal instability; this issue has been resolved by changing C31/C32 and together with the more accurate signal processing of the new firmware, the IMD performance, carrier+side-band rejection and spectral purity has been improved considerably. **(RESOLVED)**
|
||||
- R1.01: When transmitting, some distorted audio can be heard from the headphones. This is because the audio op-amps do share same 12V supply as the PA, resulting in serious amplitude RFI. Adding a (>>100uF/16V) capacitor from the Emitter of Q6 to GND alleviate the issue but does not completely resolve. There is also a possibility that RFI causes leakage into the microphone input, in this case it is recommended to increase MIC_ATTEN value in the code which attenuates the ADC input-gain with 6dB attenuation per increment.
|
||||
|
||||
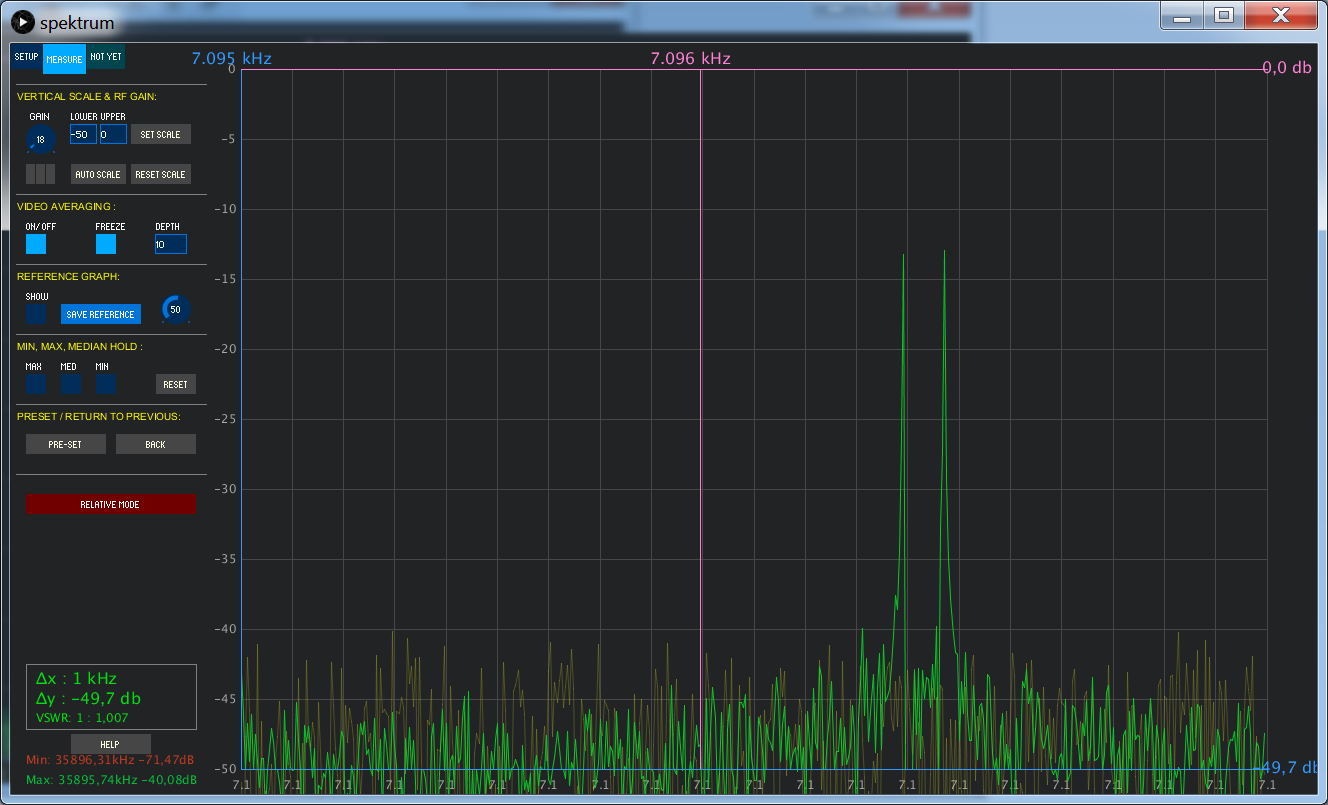
Measurements:
|
||||
The following performance measurements were made with QCX-SSB R1.01, a modified RTL-SDR, Spektrum-SVmod-v0.19, Sweex 5.0 USB Audio device and Audicity player. It is recognized that this measurement setup has its own limitations, hence the dynamic range of the measurements is somewhat limited by the RTL-SDR as this device goes easily into overload. Measurements were made with the following setttings: USB modulation, no pre-distortion, two-tone input 1000Hz/1200Hz where audio level is set just before the point where compression starts. Results:
|
||||
- Intermodulation distortion products (two-tone; SSB with varying envelope) IMD3, IMD5, IMD7: respectively -30dBc; -33dBc; -36dBc
|
||||
- Intermodulation distortion products (two-tone; SSB with constant envelope) IMD3, IMD5, IMD7: respectively -13dBc; -13dBc; -16dBc
|
||||
- Opposite side-band rejection (two-tone): better than -45dBc
|
||||
- Carrier rejection (two-tone): better than -45dBc
|
||||
- Wide-band spurious (two-tone): better than -45dBc
|
||||
- 3dB bandwidth (sweep): 400..2130Hz
|
||||
|
||||
|
||||
|
||||
### Notes:
|
||||
1. <a name="note1"/>on a new kit components IC8, IC9, R28-R35, C13-C20, C53 may be omitted if the CW filter is bypassed permanently
|
||||
2. <a name="note2"/>optionally (not recommended) a steep 2 kHz SSB filter with gain can be realized by modification of Sallen-Key CW filter: replace C13, C15, C17 with 1nF capacitor and remove C53
|
||||
3. <a name="note3"/>to support si5351 multi-band operation, the RX BPF can be omitted (C1, C5, C8, secondary 3 of T1), and a switchable LPF-bank/matching-network may be placed instead of the existing LPF C25-C28, L1-L3 and matching network C29, C30, L4. The Arduino sketch may be extended to make I2C controllable filter-bank. When using external filters the on-board LPF may be bypassed with a wire.
|
||||
4. <a name="note4"/>The occupied SSB bandwidth can be further reduced by restricting the maximum phase change (set MAX_DP to 180). The sensitivity of the VOX switching can be set with parameter VOX_THRESHOLD. Audio-input can be attenuated by increasing parameter MIC_ATTEN (6dB per step).
|
||||
5. <a name="note5"/>If the ATMEGA328P chip cannot be exchanged you may proceed with ISP programming the QCX via Uno and overwrite the existing firmware: to do so, upload the [ArduinoISP] sketch to Uno, connect Arduino Uno to QCX via [ISP jumper], power on QCX, in Arduino select "Tools > Programmer > Arduino as ISP", select "Tools > Board > Arduino/Genuino Uno", and upload [QCX-SSB Sketch] to QCX by selecting "Sketch > Upload Using Programmer". Once upload succeeds the LCD should display "QCX-SSB".
|
||||
4. <a name="note4"/>The occupied SSB bandwidth can be further reduced by restricting the maximum phase change (set MAX_DP to half a unit-circle _UA/2 (equivalent to 180 degrees)). The sensitivity of the VOX switching can be set with parameter VOX_THRESHOLD. Audio-input can be attenuated by increasing parameter MIC_ATTEN (6dB per step).
|
||||
5. <a name="note5"/>In case the ATMEGA328P chip cannot be exchanged you may proceed with ISP programming the QCX via Uno and overwrite the existing firmware: to do so, upload the [ArduinoISP] sketch to Uno, connect Arduino Uno to QCX via [ISP jumper], power on QCX, in Arduino select "Tools > Programmer > Arduino as ISP", select "Tools > Board > Arduino/Genuino Uno", and upload [QCX-SSB Sketch] to QCX by selecting "Sketch > Upload Using Programmer". Once upload succeeds the LCD should display "QCX-SSB". Note that you must disconnect the Microphone in order to use the ISCP/ISP upload facility.
|
||||
|
||||
|
||||
### Credits
|
||||
[QCX] (QRP Labs CW Xcvr) is a kit designed by _Hans Summers (G0UPL)_, a high performance, image rejecting DC transceiver; basically a simplified implementation of the [NorCal 2030] by _Dan Tayloe (N7VE)_ designed in 2004 combined with a Hi-Per-Mite Active Audio CW Filter by _David Cripe (NMØS)_, Low Pass Filters from _Ed (W3NQN)_ 1983 Articles, a key-shaping circuit by _Donald Huff (W6JL)_, a BS170 switched [CMOS driven MOSFET PA] stage as used by _Steven Weber (KD1JV)_ inspired by _Frank Cathell (W7YAZ)_ in 1988, and combined with popular components such as a Silicon Labs SI5351 Clock Generator, ATMEGA328P microprocessor and a HD44700 LCD display. The [QCX-SSB] modification and its Arduino [QCX-SSB Sketch] is designed by _Guido (PE1NNZ)_; the software-based SSB transmit stage is a derivate of earlier experiments with a [digital SSB generation technique] on a Raspberry Pi in 2013 and is basically a kind of [EER] implemented in software.
|
||||
### Credits:
|
||||
[QCX] (QRP Labs CW Xcvr) is a kit designed by _Hans Summers (G0UPL)_, a high performance, image rejecting DC transceiver; basically a simplified implementation of the [NorCal 2030] by _Dan Tayloe (N7VE)_ designed in 2004 combined with a [Hi-Per-Mite] Active Audio CW Filter by _David Cripe (NMØS)_, [Low Pass Filters] from _Ed (W3NQN)_ 1983 Articles, a key-shaping circuit by _Donald Huff (W6JL)_, a BS170 switched [CMOS driven MOSFET PA] stage as used in [ATS] by _Steven Weber (KD1JV)_ and inspired by _Frank Cathell (W7YAZ)_ in 1988, and combined with popular components such as a Silicon Labs [SI5351] Clock Generator, Atmel [ATMEGA328P] microprocessor and a Hitachi [HD44780] LCD display. The [QCX-SSB] modification and its Arduino [QCX-SSB Sketch] is designed by _Guido (PE1NNZ)_; the software-based SSB transmit stage is a derivate of earlier experiments with a [digital SSB generation technique] on a Raspberry Pi in 2013 and is basically a kind of [EER] implemented in software.
|
||||
|
||||
[QCX]: https://qrp-labs.com/qcx.html
|
||||
|
||||
[QCX Schematic]: https://qrp-labs.com/images/qcx/HiRes.png
|
||||
[original schematic]: https://qrp-labs.com/images/qcx/HiRes.png
|
||||
|
||||
[ArduinoISP]: https://raw.githubusercontent.com/adafruit/ArduinoISP/master/ArduinoISP.ino
|
||||
|
||||
|
|
@ -148,12 +147,18 @@ The IMD performance is related dependent on the quality of the system: the linea
|
|||
|
||||
[X1M-mic]: https://vignette.wikia.nocookie.net/x1m/images/f/f1/X1M_mic_pinout_diagram.jpg/revision/latest?cb=20131028014710
|
||||
|
||||
[Norcal 2030]: http://www.norcalqrp.org/nc2030.htm
|
||||
|
||||
[QRPLabs Forum]: https://groups.io/g/QRPLabs/topic/29572792
|
||||
|
||||
[Norcal 2030]: http://www.norcalqrp.org/nc2030.htm
|
||||
|
||||
[Hi-Per-Mite]: http://www.4sqrp.com/hipermite.php
|
||||
|
||||
[Low Pass Filters]: http://www.gqrp.com/harmonic_filters.pdf
|
||||
|
||||
[CMOS driven MOSFET PA]: http://www.maxmcarter.com/Classexmtr/simplebeacon/mpm_class_e.html
|
||||
|
||||
[ATS]: http://ok1hra.nagano.cz/2007_ats3b_manual_v2.pdf
|
||||
|
||||
[EER]: https://core.ac.uk/download/pdf/148657773.pdf
|
||||
|
||||
[MBF]: https://www.arrl.org/files/file/QEX_Next_Issue/Mar-Apr2017/MBF.pdf
|
||||
|
|
@ -162,3 +167,11 @@ The IMD performance is related dependent on the quality of the system: the linea
|
|||
|
||||
[Intelligibility]: https://g8jnj.webs.com/speechintelligibility.htm
|
||||
|
||||
[commit phase-measurement-experiment]: https://github.com/threeme3/QCX-SSB/tree/aaa0df404e1566cf2bb30badd9ea57e7e1ac0e98
|
||||
|
||||
[SI5351]: https://www.silabs.com/documents/public/application-notes/AN619.pdf
|
||||
|
||||
[ATMEGA328P]: http://ww1.microchip.com/downloads/en/DeviceDoc/ATmega48A-PA-88A-PA-168A-PA-328-P-DS-DS40002061A.pdf
|
||||
|
||||
[HD44780]: https://www.sparkfun.com/datasheets/LCD/HD44780.pdf
|
||||
|
||||
|
|
|
|||
{kind=link}
Plik binarny nie jest wyświetlany.
|
Przed Szerokość: | Wysokość: | Rozmiar: 146 KiB Po Szerokość: | Wysokość: | Rozmiar: 150 KiB |
{kind=link}
Plik binarny nie jest wyświetlany.
|
Przed Szerokość: | Wysokość: | Rozmiar: 388 KiB Po Szerokość: | Wysokość: | Rozmiar: 385 KiB |
{kind=link}
Plik binarny nie jest wyświetlany.
|
Po Szerokość: | Wysokość: | Rozmiar: 197 KiB |
Ładowanie…
Reference in New Issue